
We admittedly try to come up with nice click-bait titles all the time (mostly to prove that we are more clever than ChatGPT) but “How To Tune A Drone” is actually not a click-bait title.
Tuning a drone is a real thing, and, if you’re like me, you immediately wonder if it is like tuning a guitar
The short answer is: no, it’s nothing like tuning a guitar. Well, except maybe in a very metaphysical sense. “Tuning” a guitar means that your “input” (strumming the guitar) matches an “output” (sound) within a certain frequency so that it sounds good.
And “tuning” a drone means that your “input” (hand controller) matches an “output” (the speed of each of the motors) so that you can control the drone.
So how’s it different? Well, I think the key difference between guitar tuning and drone tuning is hallucinogenic drugs. You can tune a guitar while on drugs (as has been conclusively demonstrated over 5 decades), but that’s not happening with tuning drones. At least not with the Modovolo Lift. Because in order to tune the Modovolo Lift, you need an acute understanding of: (1) Math, (2) Algorithms, and (3) Science. And those activities don’t mix well with hallucinogenic drugs.
You can tune other drones with standard software programs like AutoTune (part of Arducopter) and QuickTune, both of which run through your hand controller. And both are super easy to use. You simply set parameters or use the default settings and then just flip a switch while you’re flying. But, because the Modovolo Lift is such a unique design, that doesn’t work. Those standard tuning programs lose their minds and cause the motors on the Lift to “de-sync” (i.e., lock up and stop working). We know because we’ve tried.
So how do you tune a Modovolo Lift?
Control Systems. To answer that question, we need to do a quick synopsis on “control systems” – something that makes all you technical geeks swoon with joy. And, if you’re asking what “control systems” are, you are in good company. And you are likely just a geek and not a “technical geek.”
Closed Loop Control Systems. We’re only going to talk about “closed loop” control systems. That means that the control system senses output of the drone (or a car or a plane or any other mechanical thing that moves) and makes input adjustments as needed. That’s a nice and tidy definition but it’s not super helpful for us plain geeks. So it’s example-time.
Car Driving Example. You’re driving a car and you want to go 60 miles per hour (called the “Reference” by technical geeks). But the car is only going 55 mph – five miles under the Reference (this is called the “Error”). You (as the “control system”) sense that there is an error of 5 mph so you adjust the input (gas pedal) until you are at 60 mph (and therefore the amount of error is zero).
For the Modovolo Lift, it’s more complicated. By a lot. We need a control system that takes into account multiple parameters. And that’s why we’re using what’s called a “PID control system,” something that’s been around since the 1970s and is used in many applications. For the eagle-eyed among you readers, you’re recognizing that “PID” is an acronym and that the acronym contains Calculus terminology. Nice job. Yet, to the utter disappointment of you technical geeks, we’re not going to talk about the Calculus behind PID. But we are going to show some nifty graphs.
This is what the acronym means:
P = Proportional
I = Integral
D = Derivative
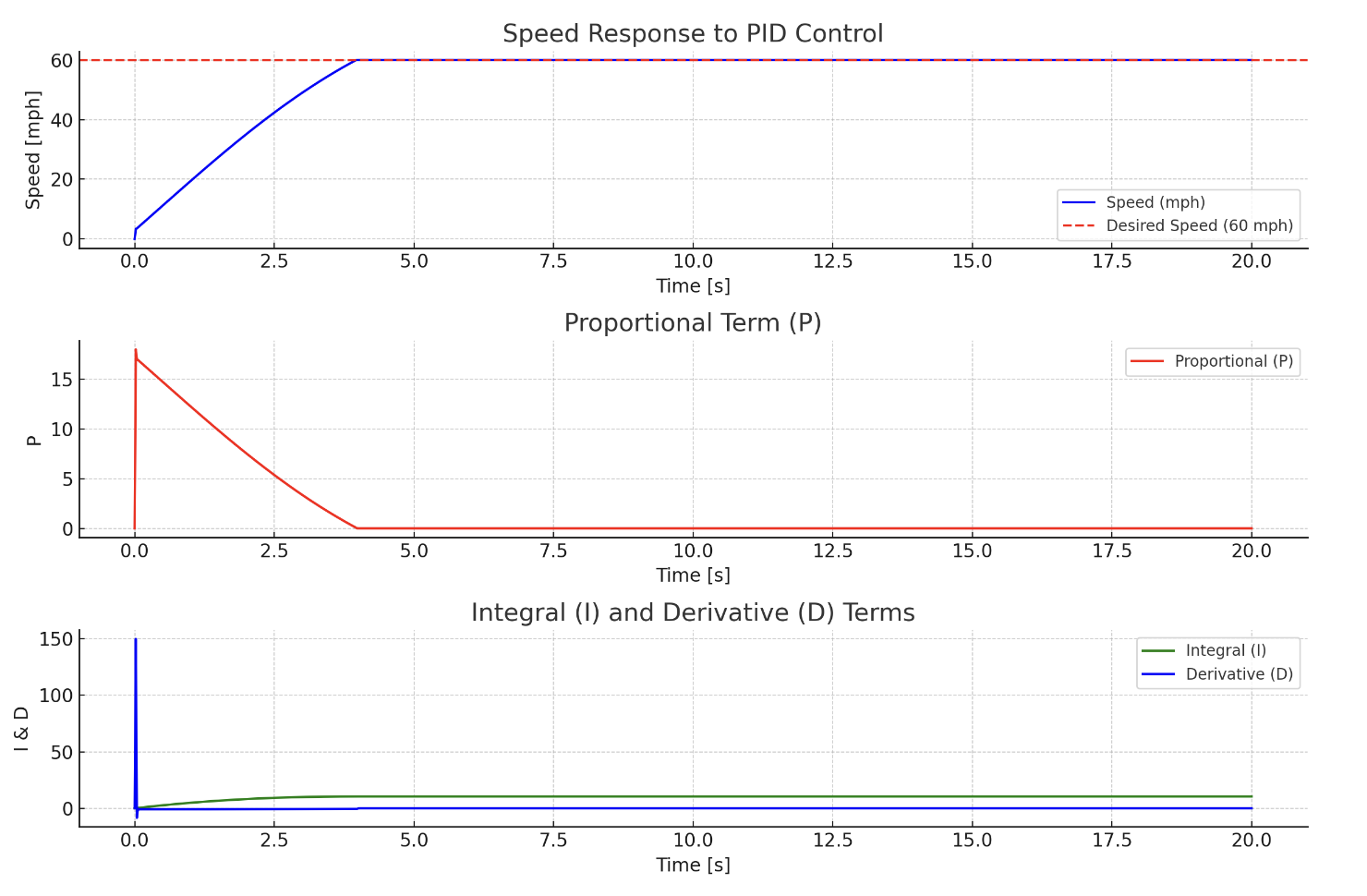
Proportional or “P” Term. The “Propotional” means that if the Error is large, then the Output will be large. And if the Error is small, so will the Output. Let’s go back to the car example. If you want to go 60 mph, but the car is only going 20 mph, then there is a big Error of 40 mph, so you are going to floor it (big Output).
Integral or “I” Term. “Integral” means that, if there are many small Errors, the control system will ignore those until there are so many that it can’t ignore it. Car example: you are driving and it’s really windy, which is pushing your car all over the place, slowing you down and speeding you up (creating many Errors). But you don’t change the accelerator immediately. You wait for a few seconds to make adjustments. (And a small nugget for you technical geeks: yes, this is the area under the curve.)
Derivative or “D” Term. “Derivative” means the rate of change. Car example: if you want to go 60 mph, but the car is only going 20 mph, then there is a big Error of 40 mph, so you need to accelerate – and you can floor it (so high rate of change) or you can gently press the accelerator (so slow rate of change). (And another small nugget for you technical geeks: yes, this is the slope of the curve.)
So how do we apply this to the Modovolo Lift? Stay tuned (such a great pun) for the “How To Tune A Drone: Part 2” in this series, where we will get excessively pedantic about PID and “bisectional algorithms” – and to learn how this applies to the Modovolo Lift.
You can pre-order your Modovolo Lift here. Only 200 pre-orders available.


